
Sziasztok,
Sikeresen eljutottunk a 2. részhez. Ebben a részben a kerékagy lesz kicsit kitárgyalva, viszonylag tömören. Túl hosszú lenne a teljes modellezési folyamatot végigvinni, és itt nem is az a lényeg.
Pár fotó a kerékagyról, kedvcsinálónak:





Ez egy elég komplex alkatrész lett. Pár nap fejfájást okozott a dolog, de megérte.
Tervezési szempontok, és limitációk a tervezés során:
- a kerékagy tartalmazza a motort
- a motor sajnos melegszik a tartóáramtól, így aktív hűtés ilyen kis méretben, sajnos elkerülhetetlen
- tartalmazza a vezérlőelektronikát, hisz a kész projekt, több mint 20 db motorból áll, így sajnos nem lehet mindent egy nagy központi vezérlőbe huzalozni
- Legyen minden négyzetmilliméter kihasználva, hisz, a lényeg hogy játék méretben megvalósítható legyen
- legyen visszacsatolás a tényleges forgásról
- legyen 1 hőmérsékletadat a kerékről (tanulási céllal, szerepe nincs)
- bírja a súlyt
- a kerék középvonalában fordúljon el a teljes szerkezet
- a lehető legolcsóbb motorral kivitelezhető legyen, hiszen így is egy drága játékról beszélünk
- van még sok apró dolog, de az már konstrukciós és szerelési probléma volt, nincs értelme részletezni
Tehát a modell magyarázata:
A motort a hestore-ból vettem. Ez nem reklám, de kénytelen vagyok a forrást megjelölni az utánépítők kedvéért. Tehát: https://www.hestore.hu/prod_10035505.html
Ez egy olcsó motor. Párat sajnos össze kellett törnöm hozzá, hogy biztosan tudjam, hogy a nyomaték megfelelő lesz a projecthez. Megfelelő.
A motor sajnos unipoláris. Vagyis a hagyományos ULN ic-vel szerelt meghajtó lenne a megfelelő választás hozzá, ha az a volna ott nem volna. De ott van. Mi a baj a hagyományos ULN meghajtóval? Először is, a tranzisztorokon esik 0,65V körüli feszültség, vagyis pocsékolja az energiát, és melegszik is. Másik probléma, hogy nem tudja a microstepping üzemmódot, vagyis rángatva mozogna a robot. Hogy még több problémát említsek a meghajóval kapcsolatban: nagy! nem fért el a kerékagyban.
Tehát a motor unipoláris. Nekünk a modern meghajtóhoz bipoláris motor kellene, de nincs olcsón. Vagyis a motort sajnos át kell alakítani a vezérlő miatt. Itt némi belső fájdalmam keletkezett, hisz kerárút nem módosítunk, mert a javítást bonyolítja. Aztán, némi gondolkodás után, mégis emellett döntöttem, hiszen ez csak egy hobbijáték, nem több.
Sajnos, max 20 db képet tölthetek fel, tehát a motor átalakításáról, egy külön cikk fog szólni. Egyébként is pár motor óhatatlanul tönkre fog menni, mert gyakorlat kell hozzá.
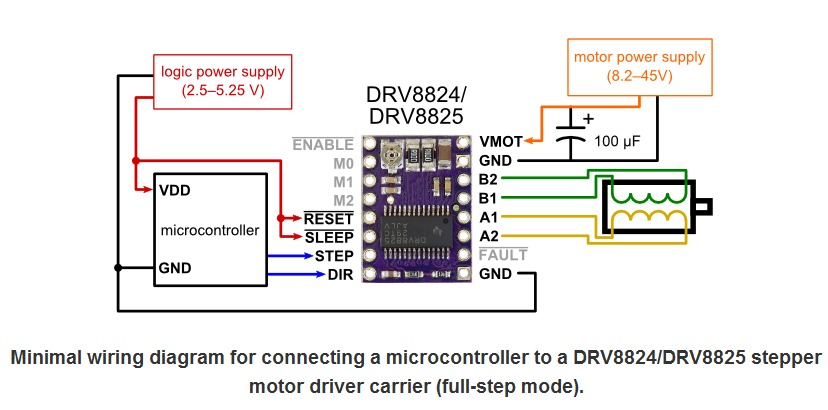
Meghajtó áramkörnek egy elég ismert típust használtam, mégpedig: https://www.hestore.hu/prod_10039065.html
vagyis a Texas Instruments DRV8825 léptetőmotor microstepp meghajtó IC-vel felépített modult. Már nem érdemes vacakolni, egyedi meghajtókkal. Tekintsünk rá úgy, mint egy alkatrészre, nem pedig úgy, mint egy előreszerelt modulra.
Az adatlapot érdemes elolvasni, rengeteg funkciót tud.
Erre a cikkre később vissza kell térnem, ahogy a szerelési folyamat halad.... kis türelem... jó munkához idő kell...
Most írom, nézz vissza párszor....



